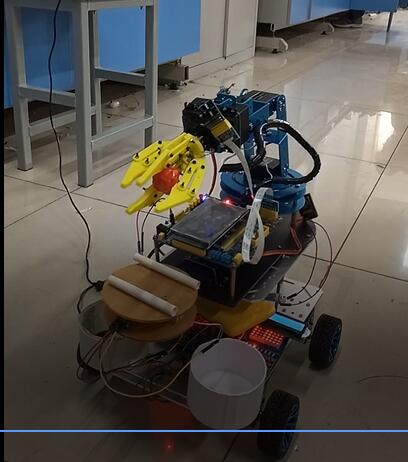
本产品名为智能果实采摘机器人,能够高效率完成寻找、识别、采摘、分果等一系列功能。智能果实采摘机器人由机械手、末端执行器移动机构、机器视觉系统以及控制系统等构成。用摄像头作为视觉传感器来寻找和识别成熟果实,利用双目视觉方法对目标进行定位。采摘采用6自由度的机械臂,活动范围大且能够形成指定的采摘姿态进行采摘。移动机构采用4轮结构,能自动行走。采摘时,移动机构行走一定距离后就进行信息采集。当识别到成熟果实时,控制机械手手指抓住果实,然后通过机械手的腕关节旋转拧下果实并按果实重量不同进行分拣。此作品可实现无人自动摘果,也支持手机蓝牙连接或游戏手柄连接进行人为控制。本产品主要有以下三点创新:
(1) 移动机构的自主导航和机器视觉系统它解决采摘机器人的自主行走和目标定位,是整个机器人系统的核心和关键。视觉导航技术利用双目立体视觉法,立体视觉法采用两个摄像头作为视觉传感器。两个传感器在空间上间隔一定距离并且视觉轴聚焦于同一场景。分别获取同一场景的平面图像:根据立体视觉原理重构三维图像:从而计算出目标的空间坐标,完成路径规划和避障任务。
(2) 创新摘果方式,采用旋转摘果方案,控制机械手手指抓住果实,然后通过机械手的腕关节旋转拧下果实,相对于剪切摘果确保了摘果的完整性和效率。
(3) 选择高自由度机械手机,械手的结构形式和自由度直接影响采摘机器人智能控制的复杂性作业的灵活性和精度,形成指定的采摘姿态进行采摘满足大部分采摘要求。